Chapter 4.1 Log File Playback
Log file playback allows you to playback a recording of the position of the robot in the GUI.
First, let us generate a log file. Create a new GSSP program using the Generic Robot state-variable set. Save this program, then run it using the meta-controller with the Dummy.py driver for about 30 seconds. Make a note of the location and file name of the log file that is used. Section 3.3 Running the Meta-controller describes how to do this.
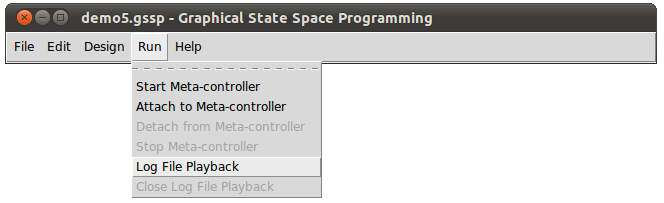
To play back a GSSP log file, the GUI must not be attached to a meta-controller process. First, make sure that the GSSP program that corresponds to the log file is opened in the GUI. Open a 2D Graphical Designer visualizing Position X and Position Y so that we can watch the playback. Then, click Run -> Log File Playback.
Navigate to the log file you wish to play back and open it. You should then see the following Playback Controls Window.
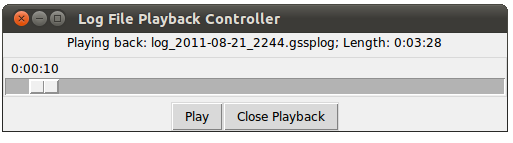
Playback will start immediately, and you should see the robot, represented as a red dot, moving in the 2D designer. You can open more designers during the playback. You can use the playback controls to pause or continue. You can drag the progress indicator to fast forward or rewind.
While you are playing back a log file, you will not be able to attach to a meta-controller process. After you are done playing back a log file, close the Playback Controls Window. This will enable you to attach to meta-controller processes.