Robotics Visualization System (RVS)
RVS is a piece of software that was developed at McGill University's Centre for Intelligent Machines. Its name is an acronym for Robot Visualization System. The software is written in C and works on Silicon Graphics workstations. RVS creates superb 3D graphics and is quite easy to use. RVS is an extremely useful 3D visual tool to determine the feasibility of a new robot design or of a Cartesian robotic path.
A robot is rendered by simply reading the Denavit-Hartenberg (DH) parameters of the robot at hand from a file. Immediately, the skeleton of the robot, i.e., its representation as a chain composed of rigid links and either revolute or prismatic joints, without geometric details on the physical shape of the links, is generated for quick visualization. The full rendering of the actual robot can also be viewed, but this requires, of course, that a database with the details of the robot-link geometry be available.
The RVS code is available here: rvs.tar.gz with the README file: README.txt
After the robot data, either its skeleton or its full rendering, are entered into RVS, the user can rotate and translate the robot as well as zoom in and out.
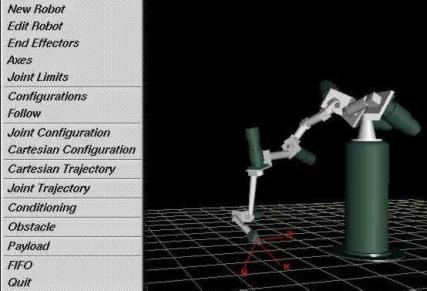
RVS offers the following features:
- Each joint variable can be controlled individually. Joint limits can also be taken into account;
- the robot can be controlled in the Cartesian space;
- the robot can move to prestored postures;
- an icon representation of the frame axes can be displayed on top of the robot display;
- the robot can follow a prestored trajectory.
RVS was developed on IRIX, the UNIX dialect of Silicon Graphics Inc. (SGI), in the 1990s. Since IRIX is native to SGI workstations, RVS does not run on Intel-based PCs. Therefore, the source code of RVS had to be modified in order to use this tool on an Intel-based PC. Therefore, the Robot Visualization System for Windows (RVS4W) was recently developed to work on PCs. The corresponding information about RVS4W could be found here: RVS4W