Research
The Mobile Robotics Lab (MRL) studies how robots can learn, reason, perceive, and act in real-world environments. Our work spans reinforcement learning, imitation learning, world modeling, field robotics, vision-language robot learning, and dexterous manipulation.
Theme 02
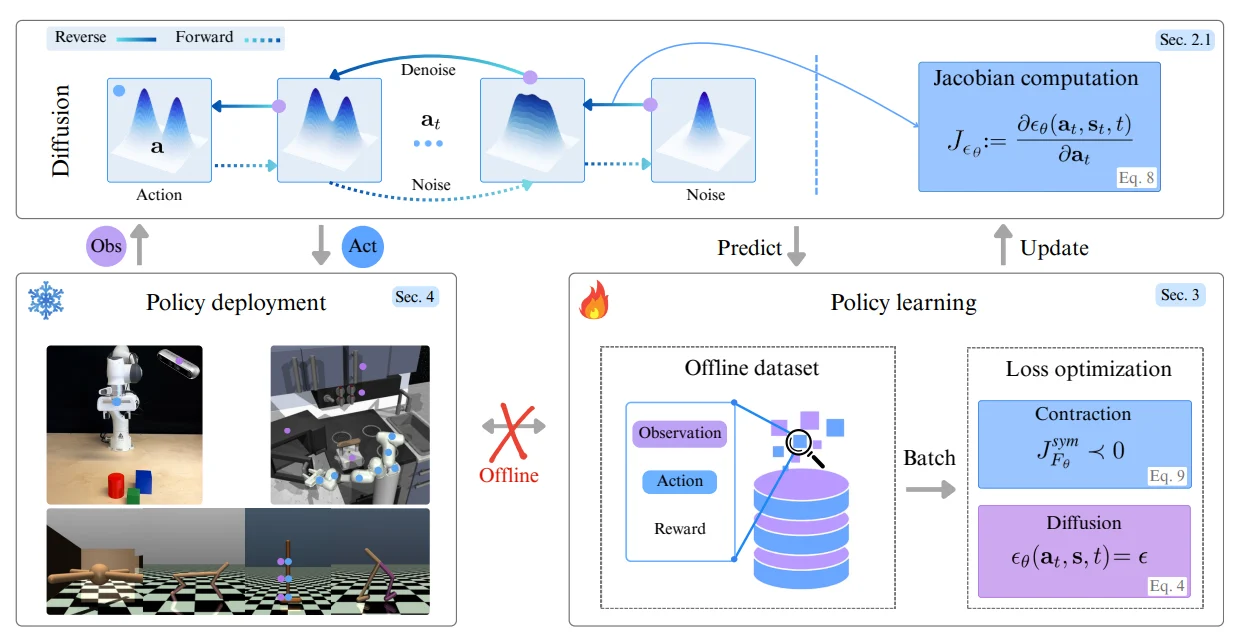
Imitation Learning
We develop imitation learning methods that let robots acquire skills from demonstrations or observations, with stable and contractive policies for safer recovery outside expert trajectories.
Theme 03
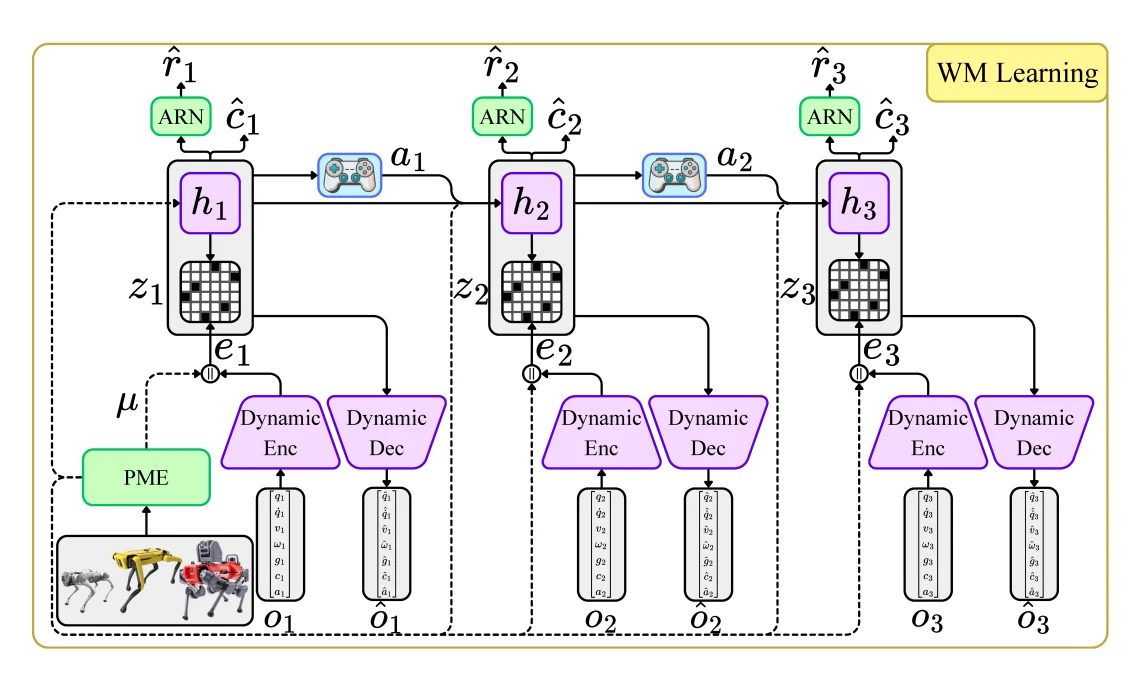
World Modeling for Robotics
We study world models that capture robot dynamics for planning, search, and behavior learning, including morphology-conditioned models for quadrupeds and model-based RL work on when search helps or hurts decision-making.
Theme 04
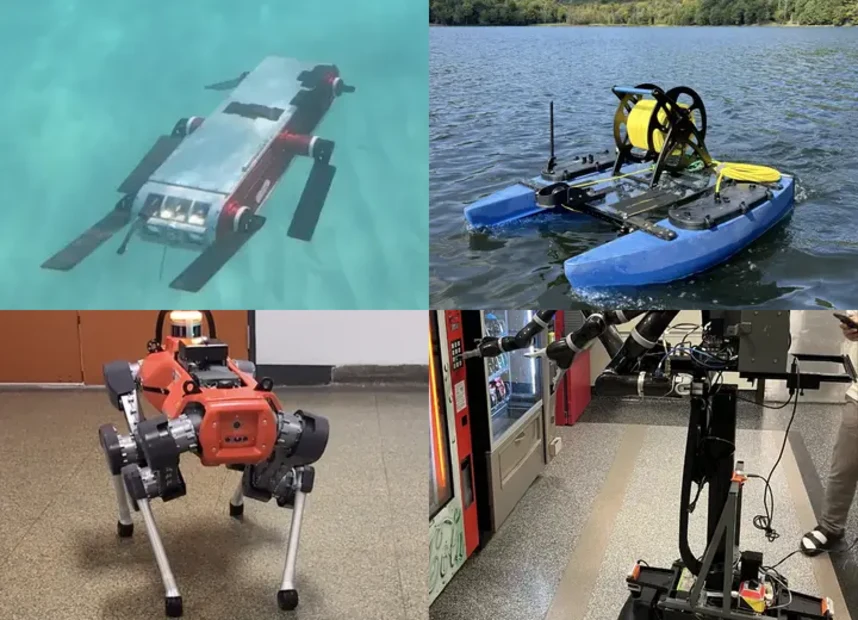
Field Robotics
Field robotics at MRL is an umbrella for deployed autonomy across forests, reefs, reservoirs, and other unstructured environments. These projects cover mapping, traversability, off-road planning, aerial marine localization, underwater autonomy, and surface vehicles.
Topological exploration
Traversability-aware maps for long-range off-trail navigation.
Vision-based traversability
Visual and multimodal terrain assessment for off-road autonomy.
Off-road attention
Trajectory-constrained visual attention for local planning.
Underwater / Aqua
Underwater navigation, visual policies, and reef autonomy.
Aerial marine localization
Drone-based localization for surface and near-surface robots.
On-water / boats
Surface vehicles for probing, sampling, and monitoring.
Theme 05
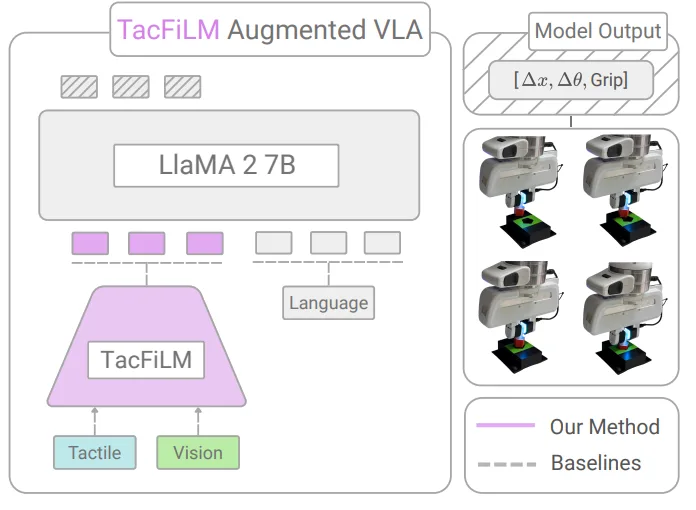
Vision-Language Models for Robot Learning
We explore how pre-trained vision and language models can ground semantic instructions, identify useful visual structure, and support robot policies, with current work on tactile VLA fusion and foundation-model reasoning for safer robot behavior.
Theme 06
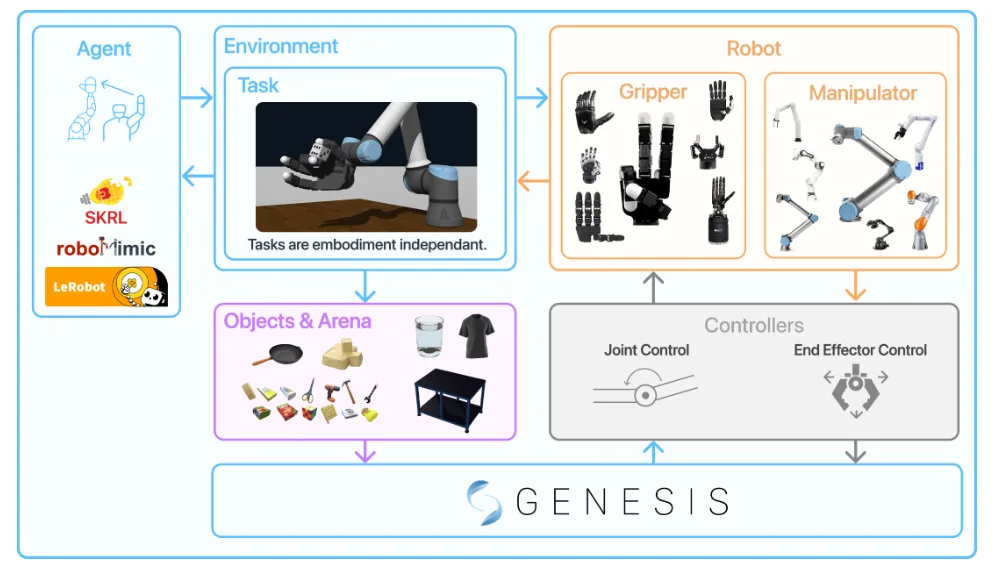
Dexterous Manipulation
We study contact-rich manipulation with multi-fingered hands and robot arms. Current work includes DexSuite, a unified simulation and benchmarking framework for dexterous manipulation, and the LEAP Hand, a low-cost anthropomorphic hand for robot learning.