Real-Time Simulation of Mechanical Systems
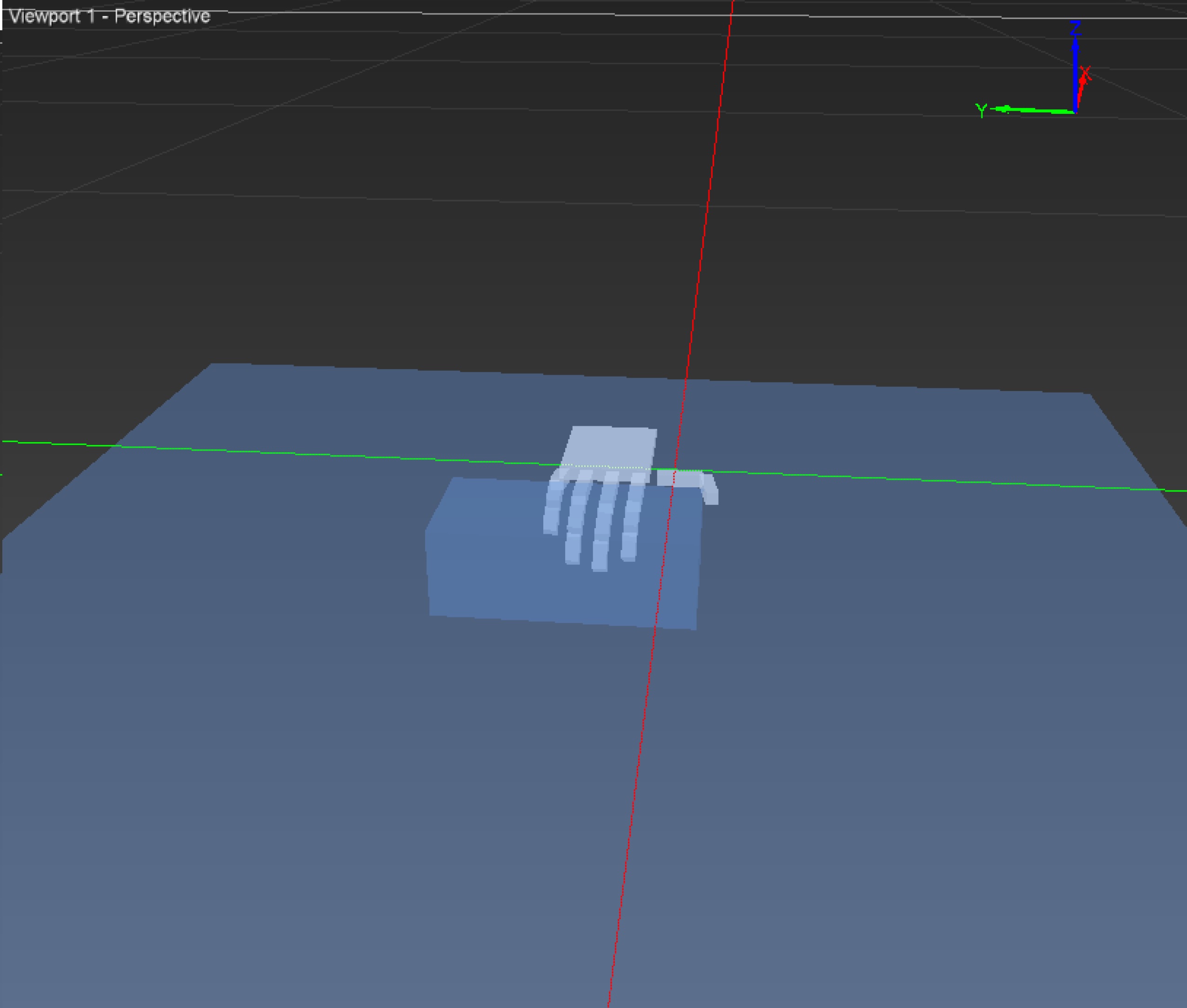
The main objective of this joint project between McGill University and CM Labs Simulations Inc. was to improve the Vortex physics engine behaviour. Vortex is one of the leading software platforms developed by CM Labs Simulations Inc. which is composed of applications for creating interactive mechanical system simulations in virtual environments. In this project, I was mainly responsible for proposing and implementing alternative contact dynamics formulations for Vortex to overcome its current shortcomings in dealing with systems experiencing large number of contact points. I also improved the solver performance of the Vortex physics engine by designing novel algorithms for dynamics of redundant contacts. These proposed methods and algorithms are currently being implemented and optimized in the Vortex software to be included in the upcoming software releases. Verifications were performed for the proposed contact methods over a range of mechanisms, from vehicle simulations to a space robotics gripper, and a robotic arm grasping mechanism.
Modeling, Analysis, and Design of Force Feed-Back Haptic Robotic Systems
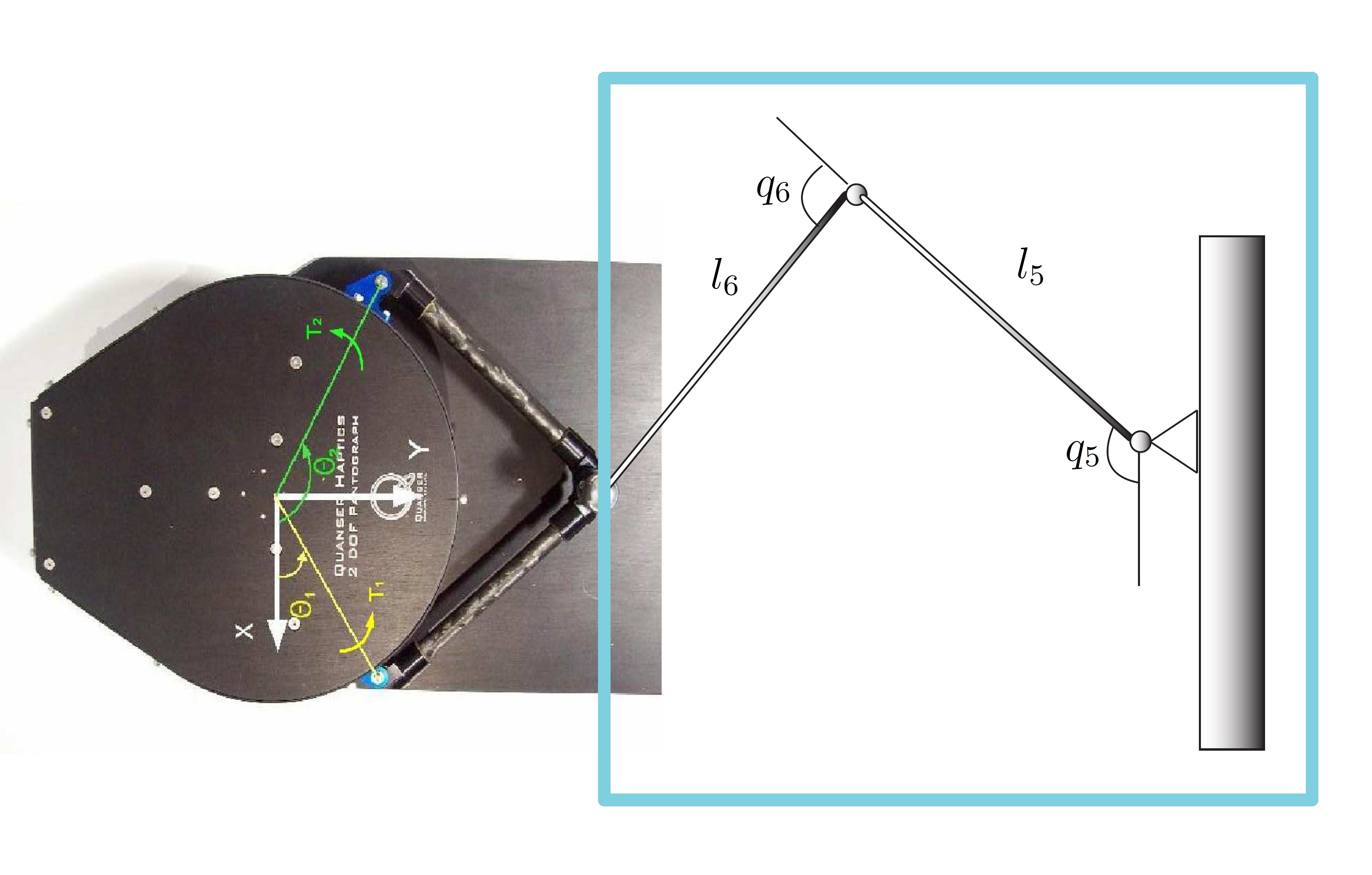
A novel parametric analysis framework for design optimization of mechanical systems was developed. Such a framework was further used for design optimization of robotic haptic systems with the main focus on contact dynamics and human-haptic interactions. The project was conducted in collaboration with Quanser Inc. Experimental validations of the framework were performed on the Quanser haptic pantograph robotic system. Furthermore, such a parametric analysis framework was further extended to be compatible with the Maple symbolic capabilities, and potentially being added as a post-analysis tool in the MapleSim package, as a collaborative project with Maplesoft company.
Kinematics and Dynamics Analyses of Human Gait Using Motion Capture Systems
In this project, kinematics and dynamics of human motion were analyzed based on the motion capture data and force plate sensors. The main objective of the study was to further analyze the kinematics and dynamics of human ankle in Inverse dynamics analyses. Moreover, a more appropriate ankle joint model based on the idea of non-stationary axis of rotation of the ankle joint was proposed. A lower extremity multibody model was developed in the Matlab environment. Simulations were performed based on the experimental data collected with the motion capture system available in the BIOMEC Lab at Polytechnic University of Catalonia.

Developing a Point-of-care Gait Assessment Tool for Patients with Multiple Sclerosis Disease
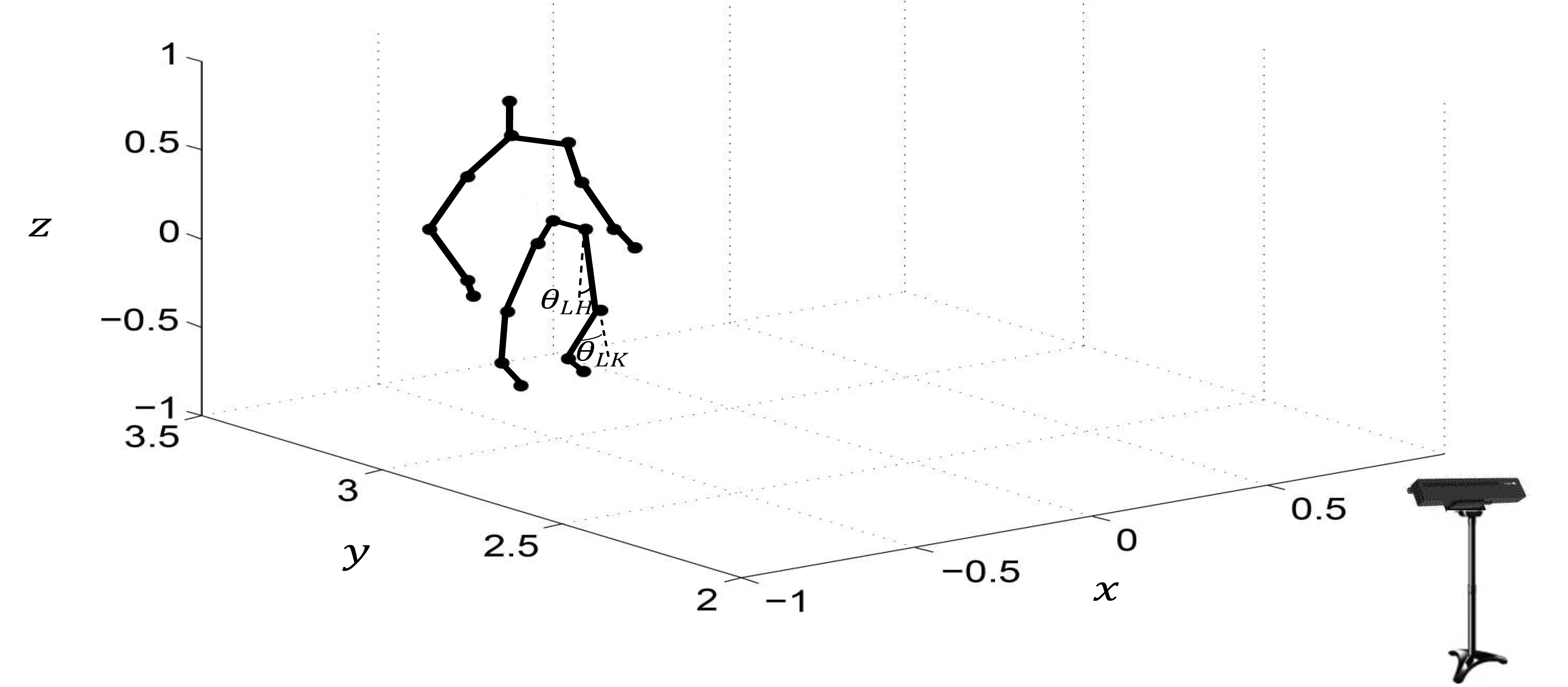
This was a project in collaboration with Montreal Neurological Institute (MNI). Gait analysis of patients with neurological disorders, including multiple sclerosis (MS), is important for rehabilitation and treatment. The Mircrosoft Kinect sensor, which was developed for motion recognition in gaming applications, is an ideal candidate for an inexpensive system providing the capability for human gait analysis. In this research, we developed a framework to quantify the gait abnormality of MS patients using a Kinect for Windows camera. In addition to the previously introduced gait indices, a novel set of MS gait indices based on the concept of dynamic time warping is introduced. The newly introduced indices can characterize a patient's gait pattern as a whole and quantify a subject's gait distance from the healthy population. We observed an acceptable level of correlation of gait indices with the multiple sclerosis walking scale (MSWS) and the clinical ambulation score. The study was performed based on 10 MS patients, and 10 age and sex-matched normal control subjects. The captured MS gait indices were significantly different from control subjects. Principal component and linear discriminant analyses were also performed to distinguish the patient population from the control subjects and quantify the level of progression of the MS disease in patients.
camera is an easy to use tool to assess gait in MS patients.